
An article published in the journal “Science Advances” reports the presentation of the project of a so-called soft robot created inspired by the cheetah’s biomechanics. This type of robot, called Leveraging Elastic instabilities for Amplified Performance (LEAP), can move much faster on solid surfaces than previous generations of soft robots. Another skill of LEAP is to grasp objects gently or with enough force to lift heavy objects. The idea of its creators is to propose a new paradigm for soft robots with different possibilities for their construction and use.
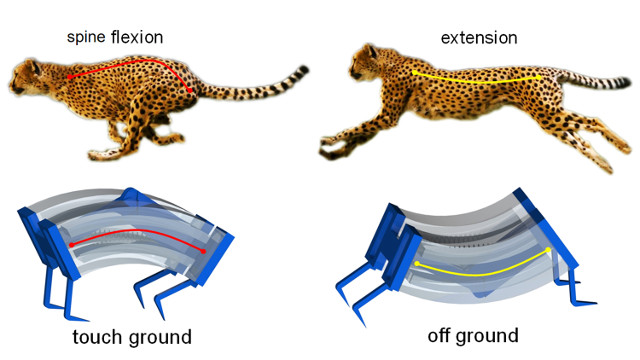
Cheetahs are the fastest animals on the mainland, and reach speeds even higher than 120 km/h (around 80 mph) by flexing their spine. A team of researchers tried to reproduce that spine with a spring-powered “bistable” structure that is part of a robot built also with soft materials. It’s a project that is part of a robotics approach that started a few years ago, and aims to use materials with characteristics similar to those existing in living beings. The image (Courtesy Jie Yin, NC State University) shows a comparison between the states of the spine of a cheetah and that of a LEAP robot.
By pumping air into the channels that line that bistable structure with soft silicone, it is possible to quickly alternate between those two stable states. Switching between the two states releases a significant amount of energy, allowing the robot equipped with that type of structure to quickly exert a force against the ground. This allows the robot to gallop on the ground with legs that leave the ground. The robots built are about 7 centimeters long for a weight of about 45 grams.
The type of movement of a LEAP robot offers great progress compared to previous soft robots, which moved slowly while remaining in contact with the ground, a type of locomotion that limits their speed. So far, the fastest robots of this type could move at speeds that could reach 0.8 body lengths per second on flat and solid surfaces. A LEAP can reach speeds of up to 2.7 body lengths per second, more than three times faster. They can also run up steep slopes, a type of movement that’s much more difficult and in some cases impossible for soft robots that exert less force against the ground.
The researchers also demonstrated an improvement in the performance of a LEAP robot compared to other soft robots in swimming. By attaching a fin instead of its feet, a LEAP robot managed to swim a little faster than the previous fastest soft robot: 0.78 body lengths per second against 0.7.
Another possibility offered by LEAP robots is to make them work together to grab objects, like pincers. By measuring the force exerted by the robots, it was possible to lift both delicate objects such as eggs and objects weighing 10 kg or more.
The LEAP robots built by researchers are prototypes as proof-of-concept, but they think they can modify their designs to improve them. Adequately sized versions could be used in a variety of ways ranging from rescue operations to industrial production. There are always unknowns in the transition from lab prototypes to products that can be used in practice, if this step is successful for LEAP robots, their developments will be interesting.
North Carolina State University published a video showing prototypes of LEAP robots in action.
