
An article accepted for publication in the journal “Robotics and Automation Letters” describes the design of a low-cost quadruped robot made available on GitHub under the free / open source BSD 3-clause license having been developed under the aegis of the Open Dynamic Robot Initiative. A team of researchers led by Ludovic Righetti of the Max Planck Institute for Intelligent Systems (MPI-IS) in Tübingen and Stuttgart, Germany, designed the robot Solo 8 using components such as torque control motors and actuators available in stores and components with 3D printing instructions available with the project. This made it possible to build a Solo 8 at a component cost of around € 4,000, still high, but less than a tenth of other robots with equivalent capabilities in performing sophisticated actions. The free license will allow others to further develop the project.
In recent years, robotics has made significant progress, so we are getting used to seeing robots that perform sophisticated actions such as walking on uneven ground, jumping, and more. These are projects that can have very high costs, even of several tens of thousands of USD for a robot, and generally they’re exclusive intellectual properties of the companies that designed them.
Technological advances have also led to the emergence of projects that include software and sometimes even hardware available under free / open source licenses. Often these are projects for people who love to tinker or educational toys, but in 2016 Ludovic Righetti and other engineers and researchers in different fields launched the Open Dynamic Robot Initiative project to create a sophisticated robot capable of rivaling robots of high level and above all high costs.
A collaboration that involved people from various institutions in different parts of the world resulted in Solo 8, a robot whose hardware and software projects are available on GitHub to allow anyone interested to build one and participate in its development, also to create other projects.
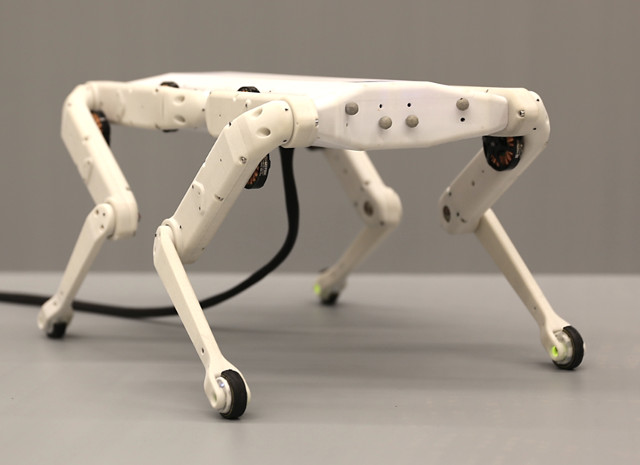
The Solo 8 robot is light with a weight of approximately 2.2 kilograms. Many quadruped robots are much heavier and have more problems, including safety during tests. Thanks to its torque-controlled motors that work as the muscles and tendons of animals’ legs allowing it to perform a 65 centimeters jump having a height of 24 centimeters. There are no mechanical springs among its components, but the spring effect can be programmed by tuning the motors.
Solo 8 owes the number to the 8 actuators used for its joints: each leg can change its angle and length, offering flexibility in movements with 8 degrees of freedom. The team recently finished a new version with an additional degree of freedom per leg that can jump sideways and was named Solo 12.
Even having a 3D printer, building a Solo 8 robot is expensive at around 4,000 Euros. However, for research and various tasks in the field of robotics that’s a far lower price than that of robots with comparable capabilities. Professionals and fans in this sector can contribute to the development of these robots thanks to its free license.
This Open Dynamic Robot Initiative video shows an introduction that illustrates the capabilities of the Solo 8 robot.
